MASCOT is klaar met de verkenning van Ryugu
Zes minuten vrije val, een zachte inslag op de asteroïde en daarna 11 minuten stuiteren alvorens tot stilstand te komen. Dat is hoe, in de vroege ochtend van 3 oktober 2018, de reis van de MASCOT asteroïde lander begon op de asteroïde Ryugu. Daarna begon een 17 uur durende wetenschappelijke verkenning van de bijna 900 meter grote asteroïde.
De lander werd bestuurd vanuit het MASCOT Control Centre van het Deutsches Zentrum für Luft- und Raumfahrt; DLR) in Keulen in de aanwezigheid van verschillende wetenschappelijke teams uit Duitsland, Frankrijk en Japan. MASCOT overtrof alle verwachtingen en voerde zijn vier experimenten uit op verschillende plekken op de asteroïde. Nooit eerder in de geschiedenis van de ruimtevaart is een object in ons zonnestelsel op deze manier bestudeerd. Het was mogelijk om, op basis van foto’s van de Japanse Hayabusa2 het precieze pad van MASCOT te volgen en te linken aan de gegevens die MASCOT naar de Aarde stuurde.
Het DLR schrijft het succes toe aan het gebruik van geavanceerde robottechnologie, een gedegen voorbereiding en intensieve internationale samenwerking tussen wetenschappers en ingenieurs van Japan, Frankrijk en Duitsland. De missieleiding is opgetogen over hoe MASCOT zich heeft weten te verplaatsen door een landschap dat bezaaid is met keien en rotsen. Bovendien heeft MASCOT enorm veel wetenschappelijke gegevens weten te verzamelen.
MASCOT had geen aandrijvingssysteem en landde dus met een vrije val op de asteroïde. Zes minuten na het loslaten door de Hayabusa2 en het volgen van een ballistisch traject, maakte de verkenner contact met de asteroïde. Aan het oppervlak verplaatste MASCOT zich door het activeren van een draaiende arm gemaakt van wolfraam. Deze arm werd door een motor versneld en vertraagd. Dit maakte het mogelijk om MASCOT te herpositioneren in de juiste richting en bovendien zorgde de arm er voor dat MASCOT over het oppervlak kon springen. De aantrekkingskracht op Ryugu is slechts 1/66.500ste van de aantrekkingskracht op Aarde. Dit betekent dat een heel klein beetje beweging voldoende is voor een flinke verplaatsing.
Een rotsachtige tuin vol met keien en geen vlakke gebieden
Om de weg van MASCOT over het oppervlak van Ryugu te volgen werden de camera’s aan boord van de Hayabusa2 op de asteroïde gericht. De Optical Navigation Camera (ONC) maakte verschillende foto’s van de vrije val van MASCOT, en zag de schaduw van de lander op de grond tijdens de val. Uiteindelijk werd MASCOT aan de grond ook op verschillende opnames gedetecteerd. Ook de ontelbare keien die verspreid over het oppervlak liggen werden door de MASCCAM-camera aan boord van MASCOT geregistreerd. De combinatie van deze informatie maakte het mogelijk om de bewegingen van de lander aan het oppervlak in kaart te brengen.
Na het eerste contact kaatste MASCOT soepeltjes terug van een groot rotsblok, raakte de grond en stuiterde nog ongeveer acht keer en kwam in een voor metingen ongunstige positie terecht. Na het uitvoeren van een corrigerende manoeuvre kwam MASCOT in een goede positie terecht. Waar deze tweede positie zich precies bevond wordt nog onderzocht. Op die plek verrichtte de lander gedurende een dag en nacht op de asteroïde gedetailleerde metingen. Hierna werd een kleine verplaatsing uitgevoerd zodat de MicrOmega spectrometer nog beter de samenstelling van het materiaal waar de asteroïde uit is opgebouwd kon bepalen.

Image credit: JAXA / Tokyo University / Kochi University / Rikkyo University / Nagoya University / Chiba Institute of Technology / Meiji University / Aizu University / AIST.
Uiteindelijk werd MASCOT weer in beweging gezet voor een laatste grotere sprong. Op de laatste locatie werden voor het invallen van de derde nacht op de asteroïde nog meer metingen uitgevoerd. Hierna kwam de lander buiten bereik van de Hayabusa2 en werd het contact verbroken. Vanwege de koude nacht op de asteroïde verwachtte de vluchtleiding dat de accu’s van MASCOT het minder dan 16 uur uit zouden houden maar uiteindelijk heeft de lander 17 uur gefunctioneerd. Tijdens de missie kreeg de landingsplaats van MASCOT de bijnaam “Alice’s Wonderland”, naar het gelijknamige boek van Lewis Carroll (1832-1898).
Een echt sprookjesland
De wetenschappers hebben de gebeurtenissen gereconstrueerd die op Ryugu hebben plaatsgevonden en ze zijn nu druk bezig met het analyseren van de verkregen data en afbeeldingen. Vanaf een afstand hadden ze al een idee over hoe het landschap er uit zou zien maar MASCOT heeft aangetoond dat het nog gekker is dan men had verwacht. Alles is bedekt met ruwe rotsblokken en bezaaid met keien. Hoe massief de rotsblokken zijn en uit wat voor materiaal ze bestaan in nog niet bekend. Maar het meest verrassende is dat er nergens grote opeenhopingen van heel fijn stof zijn gevonden. Dit is iets wat men totaal niet had verwacht. Dit zal de komende weken intensief worden onderzocht want eigenlijk zou kosmische erosie gezorgd moeten hebben voor grote hoeveelheden fijn stof.
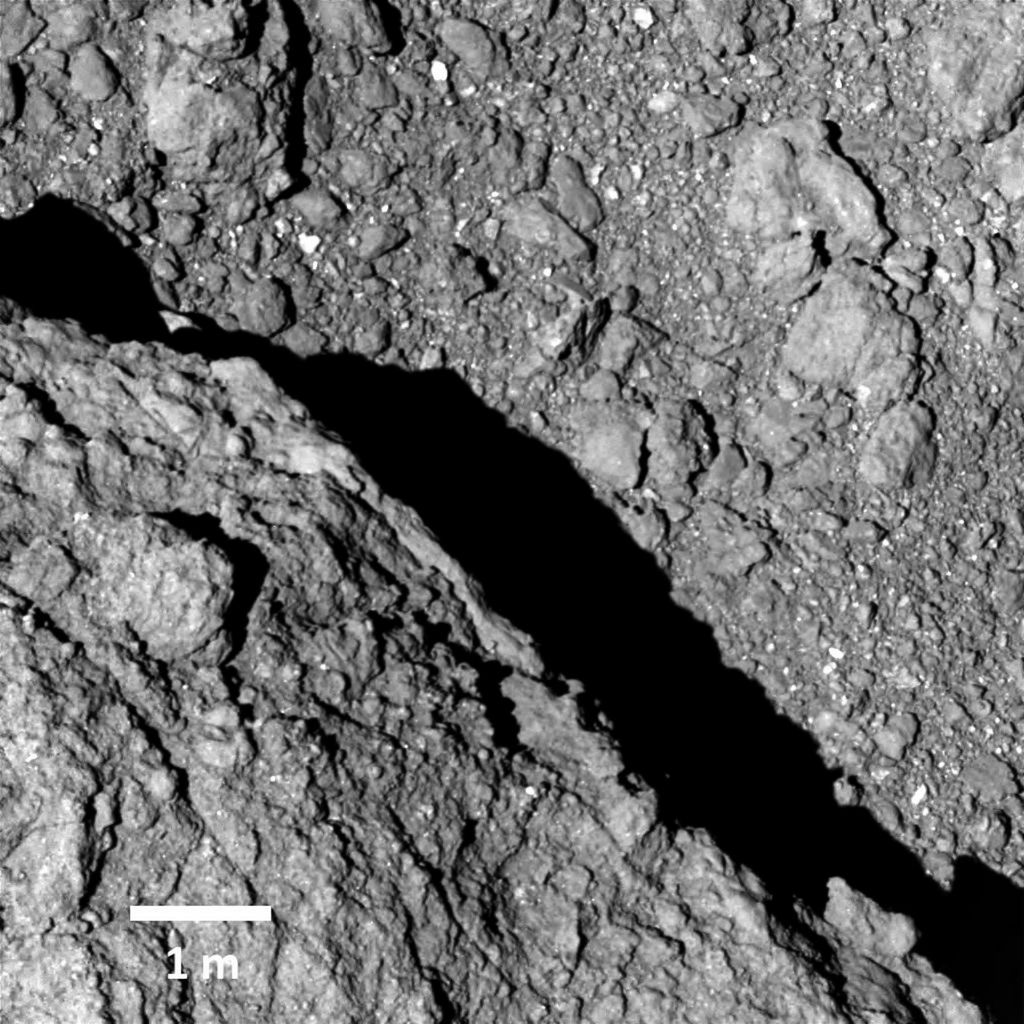
Image credit: JAXA / Tokyo University / Kochi University / Rikkyo University / Nagoya University / Chiba Institute of Technology / Meiji University / Aizu University / AIST.
MASCOT heeft precies gedaan waar de lander voor was ontworpen: een verlengstuk van de ruimtesonde aan het oppervlak van Ryugu waardoor er directe metingen gedaan konden worden. Er zijn nu metingen beschikbaar over een breed gebied, van telescopische lichtcurves gemaakt vanaf de Aarde naar remote sensing door Hayabusa2 naar microscopische bevindingen gedaan door MASCOT. Dit is heel erg belangrijk voor het karakteriseren van dit soort asteroïden.
Ryugu is een asteroïde van het C-type; koolstofrijke asteroïden die behoren tot de oudste objecten van ons 4,5 miljard jaar oude zonnestelsel. Het is een oer-bouwsteen van planeetvorming en een van de 17.000 bekende aardscheerders.
Op Aarde zijn meteorieten gevonden die qua samenstelling grote overeenkomsten vertonen met Ryugu. Ze zijn gevonden in de Murchison Range in Australië maar wetenschappers denken dat deze meteorieten niet afkomstig zijn van asteroïden zoals Ryugu. Ze zijn nogal zwaar en de gegevens die de MARA-radiometer van MASCOT heeft verzameld wijst er op dat Ryugu poreuzer is. Het onderzoek is pas begonnen maar men neemt aan dat brokstukken van Ryugu een reis door de atmosfeer van de Aarde niet zouden overleven.
Over de Hayabusa2-missie en MASCOT
Hayabusa2 is een missie van JAXA, de Japanse ruimtevaartorganisatie, naar de aardscheerder Ryugu. De Frans-Duitse lander MASCOT aan boord van de Hayabusa2 werd door DLR (Deutsches Zentrum für Lucht- und Raumfahrt) ontwikkeld en in nauwe samenwerking met de Franse ruimtevaartorganisatie CNES (Centre National d’Etudes Spatiales) gebouwd. DLR, het Institut d’Astrophysique en de Technische Universiteit van Braunschweig hebben meegewerkt aan de ontwikkeling van de wetenschappelijke instrumenten aan boord van MASCOT. De MASCOT-lander en zijn experimenten werden aangestuurd door DLR met hulp van CNES en in voortdurende samenwerking met het team van Hayabusa2 in Japan.
Het DLR-instituut in Bremen was samen met CNES verantwoordelijk voor het ontwikkelen en testen van de lander. Het DLR Institute of Composite Structures and Adaptive Systems in Braunschweig was verantwoordelijk voor de stevige structuur van de lander. Het DLR Robotics and Mechatronics Center in Oberpfaffenhofen ontwikkelde de draai-arm die ervoor zorgde dat MASCOT over het oppervlak kon springen. Het DLR Institute of Planetary Research in Berlin nam deel aan de ontwikkeling van de MASCAM-camera en de MARA-radiometer. MASCOT werd bestuurd vanuit het MASCOT Control Center in het Microgravity User Support Center dat zich bij DLR in Keulen bevindt.
Eerste publicatie: 14 oktober 2018
Bron: diverse persberichten